Výzkumná skupina robotiky Robo@FIT
Výzkumná skupina robotiky Robo@FIT
Skupina robotického výzkumu na FIT se zaměřuje na vývoj pokročilých metod autonomních inteligentních systémů a mobilních platforem, zpracování a fúze senzorických dat, tvorbu dynamických 3D modelů prostředí, inteligentní rozhodování a plánování misí, správou znalostí, multiagentních systémů a pokročilou interakcí člověka s robotickými systémy.
Výzkumná témata
- Zpracování a fúze senzorických dat
- Detekce a klasifikace objektů
- Lokalizace a mapování
- 3D modelování prostředí
- Simulace a Vizualizace
- Pokročilá a asistivní uživatelská rozhraní
- Rozšířená realita, Virtuální realita
- Kolaborativní robotika
Aktuální zaměření výzkumu
Skupina robotického výzkumu na FIT se aktuálně věnuje výzkumu v oblasti interakce člověka s robotem a to zejména ve sdíleném kolaborativním prostředí v úlohách programování, parametrizace či revize výrobních procedur s využitím rozšířené reality.
Významné výsledky
- ARCOR2 - framework pro snadné programování robotů
- Uživatelské rozhraní pro spolupracujícího robota založené na rozšířené realitě
- Teleoperating Assistive Robots: A Novel User Interface for Remote Manipulation and Navigation Relying on Semi-Autonomy and Global 3D Environment Mapping
- Spolupracující robot 2.0: vnímání pracovního prostředí, uživatelské rozhraní založené na rozšířené realitě, snadné nasazení a rekonfigurace
Spolupráce
V oblasti bezpečné interakce člověka s robotem nabízíme spolupráci na řešení úloh programování a inspekce procedur kolaborativních robotů v Průmyslu 4.0 s využitím mobilních zařízení a rozšířené reality. Příkladem je nedávná spolupráce s firmou ABB (video).
Další informace
- Dne 4.11.2015 skupina Robo@FIT pořádá ROS workshop 2015 - další ročník semináře praktických zkušeností s platformou ROS.
- Dne 29.10.2014 skupina Robo@FIT pořádala ROS workshop 2014 - další ročník semináře praktických zkušeností s platformou ROS.
- Dne 22.5.2014 pořádala Fakulta informačních technologií VUT v Brně akci Robo@FIT Open Day, kde představila své robotické platformy - od pozemních až po letecké - společně s ukázkovými aplikacemi na těchto platformách, včetně vybavení laboratoří a vybraných výsledků výzkumné robotické skupiny a studentských prací.
Akci navštívilo přes 50 účastníků, mezi kterými byli i studenti jiných brněnských vysokých škol, zástupci firem a širší veřejnost. (pdf)
- Getting started in Robotics&ROS - druhý ročník semináře praktických základů práce s platformou ROS
Robotická laboratoř
Robotická laboratoř se skládá z několika detašovaných pracovišť a je vybavena mobilními roboty pro pohyb po zemi i ve vzduchu, ve vnitřních i vnějších prostředích. Součástí jsou i laboratoře pro vývoj platforem a elektroniky, kde probíhá např. vývoj záchranářského robota RUDA a laboratoř pro průmyslovou manipulaci pro experimenty s průmyslovým manipulátorem MELFA. Vybavení laboratoře umožňuje výkum v oblastech fúze dat z různých senzorů (obrazové, hloubkové, inerciální apod.), měření a rekonstrukce v 3D prostoru, plánování a navigace pozemních i vzdušných robotů, interakce člověka se strojem (robotem), validace percepčních technologií v robotických či dohledových systémech atd.
Vybavení robotické laboratoře (popis v angličtině):
- PR2 is robotic research and development platform that combines the mobility to navigate human environments and the dexterity to grasp and manipulate objects in those environments.
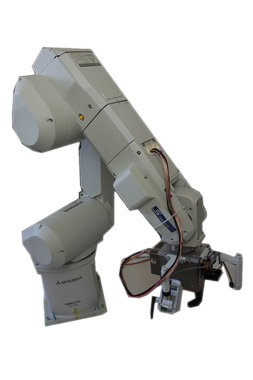
- MELFA RV6-SL robotic manipulator workcell. Example of tasks is collecting of known objects that are scattered on the floor. The robot finds them with a sensor, plans motion to collect them and executes the motion.

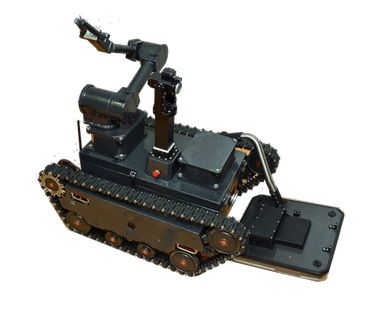
- Rescue Robot was designed by FIT researchers for search of human beings in damaged houses, debris or avalanches. It is remotely controlled by an operator endowed with a small amount of intelligence to protect itself and to find way back in case of loss of communication. Its modular design of the body and electronics allows full support of the operator and choice of the appropriate set of sensors for the given task.
- Toad platform is outdoor platform with novel 3D Lidar technology. The Toad is focused on development of large-scale SLAM, 3D environment model reconstruction, navigation and exploration.
- Pioneer 3-AT,http://www.mobilerobots.com/Libraries/Downloads/Pioneer3AT-P3AT-RevA.sflb.ashx
- Lidar, Velodyne HD Lidar HDL-32E,http://velodynelidar.com/lidar/hdlproducts/hdl32e.aspx
- high-performance, miniature GPS-Aided Inertial Navigation System (GPS/INS), IMU+GPS 3DM-GX3-45-USB-SK1,http://www.zse.de/index.cfm/content/products/gr_id/844/
- Lidar, Hokuyo UTM-30LX, http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
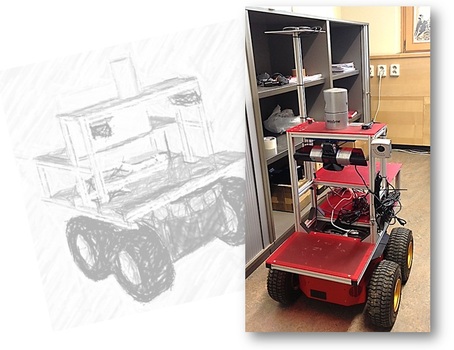
- Edward (or Ed) is platform assembled for development particular service robotic tasks such as social interaction, transportation, person-following, etc.
- PatrolBot,http://www.mobilerobots.com/Libraries/Downloads/PatrolBot-PTLB-RevA.sflb.ashx
- Lidar, Hokuyo UTM-30LX, http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
- ASUS Xtion Pro, Kinect
- Lenovo All-in-One touch screen

- Tyra is UAV platform for large-scale environment mapping, monitoring, inspection, etc.
-
- UAV, AscTec Pelican,http://www.asctec.de/downloads/flyer/AscTec-UNI-Flyer-2011-No-08_Infos-only.pdf

- UAV, AscTec Pelican,http://www.asctec.de/downloads/flyer/AscTec-UNI-Flyer-2011-No-08_Infos-only.pdf
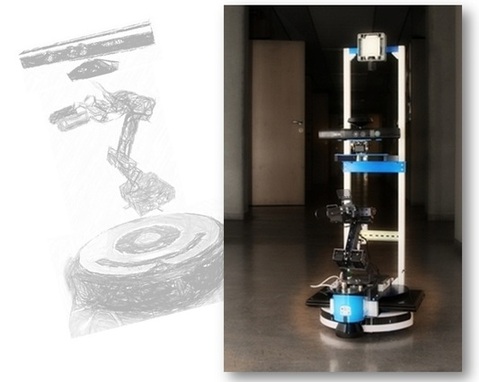
- TurtleBut2 (or TB2) is experimental laboratory platform designed to service robotics task in indoor environment.
- TurtleBot, http://turtlebot.com/
- Kinect
- Lidar, Hokuyo UTM-30LX, http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
- WiFi AP - TP-LINK TL-WR1043ND,http://www.alza.cz/tp-link-tew-671br-d235410.htm
- Low-cost IMU, Pololu CHR-UM6 Orientation Sensor, http://www.pololu.com/catalog/product/1255
- Manipulator, CrustCrowler AX-18A,http://www.crustcrawler.com/products/AX-18F%20Smart%20Robotic%20Arm/
- Joystick - Sony PS3 DualShock 3,http://www.alza.cz/bezdratovy-vibracni-gamepad-sony-dualshock-3-pro-ps3-cerny-black-d85804.htm#foto
- The robotic lab is further equiped by wide range of tools and devices:
- fully equipped hardware development working place with a modern tools
- common cameras and radars, Kinects, stereo-cameras
- Lidar - SICK LMS 100
- HRI devices (iPads, ThinkPad Tablets, widescreen multi-touch displays ELO 4200L (42") or NEC V-Touch 3210w (32"))
- VR/AR tools (ARvision-3D, i-glasses PC 3D PRO, eMagin Z800 3DVisor, CyberGlove, CyberTouch, Flock of Birds etc.), Microsoft HoloLens