Product Details
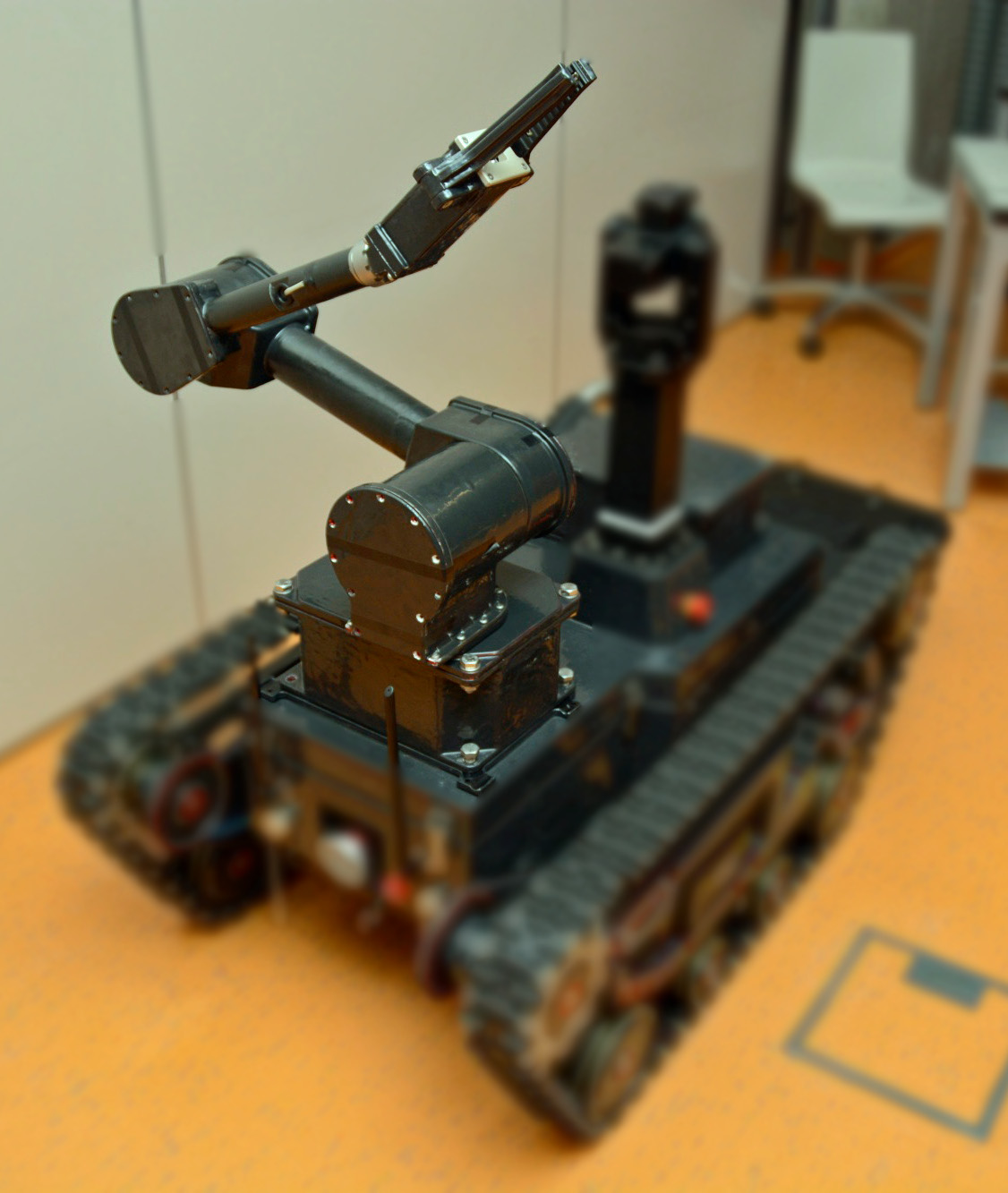
Funkční vzorek manipulátoru robota
Created: 2013
English title
Functional model of robot manipulator
Type
functional specimen
License
In order to use the result by another entity, it is always necessary to acquire a license
License Fee
The licensor requires a license fee for the result
Authors
Drahanský Martin, prof. Ing., Ph.D.
Orság Filip, Ing., Ph.D. (DITS)
Váňa Jan, Ing.
Hájek Josef, Ing., Ph.D.
Marvan Aleš, Ing.
Novotný Tomáš, Ing.
Orság Filip, Ing., Ph.D. (DITS)
Váňa Jan, Ing.
Hájek Josef, Ing., Ph.D.
Marvan Aleš, Ing.
Novotný Tomáš, Ing.
Keywords
robot platform, manipulator, functional model
Description
This is a functional model of the robot platform manipulator of the project "Robot for search of human beings in incrushes and avalanches", MoI CZ VG20102014024.
Location
Files
{kind=link}
Projects
Robot for search of human beings in incrushes and avalanches, MV, Program bezpečnostního výzkumu České republiky 2010 - 2015, VG20102014024, start: 2010-10-01, end: 2014-07-31, completed
Research groups
Departments